
What is  ?
?
RoboSub is an international robotics competition hosted by the US Navy's Office of Naval Research and RoboNation, held at the Woollett Aquatics Center in Irvine, California. Although it is normally held at the Naval Information Warfare Center in San Diego, California, AUVs are built by student teams to complete tasks that represent marine challenges, such as object detection and oceanographic exploration.
Throughout seven 12-hour days of competing and presenting, teams put their robots to the test and develop healthy rivalries along the way. By the end of the competition, teams will have been graded on obstacle course performance, team websites, outreach, design presentations, system assessments, technical papers, and introductory video.









ARVP's Robots
Our two autonomous underwater vehicles, Kenai & Koda, had a strong showing at RoboSub 2025, placing 5th out of 58 teams for design documentation and 9th in the autonomy challenge!
Kenai, our primary AUV, is designed around simplicity with fewer components, fewer failure points, and all the subsystems needed to complete the full course independently. Supporting it is Koda, a vision-based AUV that communicates acoustically with Kenai underwater to handle navigation tasks, making ARVP one of the few teams running a coordinated multi-vehicle system. Heading into 2025-2026, with both platforms mechanically stable and hardware downtime at an all-time low, our focus shifts to maximizing software testing time in the pool alongside targeted optimization projects on the mechanical and electrical side.
ARVP is planning to complete all tasks at RoboSub 2026 for the first time in our history!

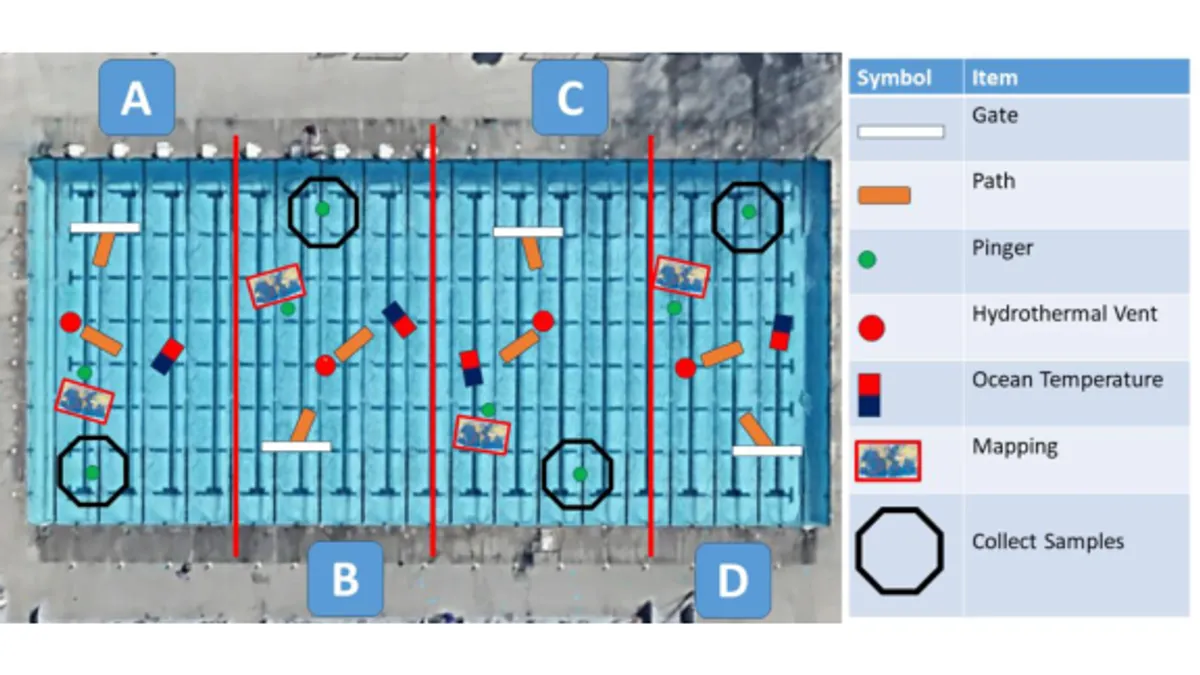
Obstacle Course Challenges
RoboSub tasks combine navigation, perception, and manipulation under realistic marine conditions. Teams build resilient perception stacks and control systems to handle disturbances, identify target features, and complete mission objectives within a constrained course. Below are representative challenges teams face.
- 1 Readjust bearing after being dunked randomly
- 2 Traverse through a specific side of a gate
- 3 Complete rotations or barrel rolls for style & pose control
- 4 Navigate via passive sonar or machine vision models
- 5 Navigate channel in a slalom maneuver
- 6 Fire torpedoes through cutouts in the correct order
- 7 Drop markers off in the correct bin
- 8 Rotate same number of times as markers in a particular bin
- 9 Pickup objects and place them in the correct section of a platform
- 10 Return to the starting gate
RoboSub 2026 — Strategy & Goals
Heading into 2025-2026, with Kenai at its most stable state yet, our entire strategy was built around one goal: maximizing software testing time. On the hardware side, this meant being deliberate with scope: any design changes were thoroughly validated at the component and system level, and completed months before competition so that software had a stable, unchanging platform to work with. On the software side, the focus was repeatability and seamless task chaining. With only 30-minute slots at the competition venue, there's no room to figure things out on the fly, so everything has to be dialled in beforehand. A new tactical IMU also helped eliminate the yaw drift issues that had previously disrupted task execution.
Gate
After the coin flip, Kenai passes through and acoustically signals Koda, which confirms the signal with a flashing light. Koda passes as well, performing barrel rolls for style.
Slalom
Kenai uses vision to align with the center red pole, then executes a precise lateral and forward maneuver using IMU and DVL to clear each set of poles.
Dropper
Kenai visually identifies the correct bin based on its role's symbol, drops both markers into the matching bin, and interacts with the magnetic detector to turn off the light.
Pinger
Acoustic cues determine if Kenai approaches table or torpedo first.
Torpedo
Kenai visually identifies the correct board, fires a torpedo through the larger opening first, then the smaller one in sequence, from at least 1.5 ft away for maximum points.
Octagon
Kenai locates the octagon visually, collects the items, surfaces inside with collected items, places them in the correct role-specific basket, faces the correct hanging image based on how many items are in the basket, and rotates the corresponding number of times for maximum points.
For a full explanation of our competition goals and task-specific strategy, find our Technical Design Report and other design documentation below.
View Technical Design Report










