
1997-2001 • Club Inception


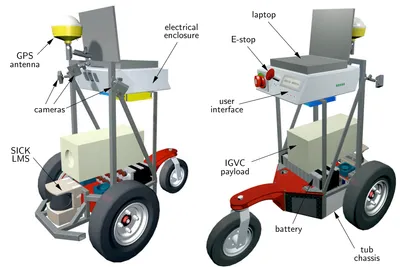
The Autonomous Robotic Vehicle Project (ARVP) was founded at the University of Alberta during the 1996-1997 school year to compete in the newly developed Annual Intelligent Ground Vehicle Competition (IGVC) held in Rochester, Michigan. The initial 14 students achieved 7th place overall with their initial design of Polar Bear.
The next year, the team was contacted by Schlumberger Geco-Prakla - a company conducting seismic surveying work in the oilfield - to help fund the development of robots for geophysical surveying. With additional funding and new goals, work on Polar Bear grew to a 50-student endeavour. While the team still competed in IGVC, scoring second in design, Polar Bear was transitioned to real-world application until 2001 when the project was fully transitioned to Defence Research and Development Canada.
The team, however, was gaining financial support to further software capabilities. ARVP developed Bear Cub over a one-year period from 2000-2001. It would take most electrical systems of Polar Bear but dramatically reduce size and functionality to focus on competition-based navigation. The pursuit proved fruitful, with Bear Cub winning first in navigation!
Robots from this era

Polar Bear

Bear Cub
2002-2007 • Dry Runs



The period after Bear Cub’s creation was quite tumultuous for ARVP. When the team reached a size of 50 members, the project was split into two - with the older founders working on Bear Cub and Polar Bear, while the new students were tasked with creating Kodiak in a one year period. This split had a myriad of knock-on effects.
Firstly, the systems integration subteam (integral in previous years) had no time to focus on Kodiak. Thus with little guidance or technological heritage, the younger members of the team had to rush through design, prototyping, construction, and testing to attend the IGVC 2002. While Kodiak received 5th in design, ARVP was unable to place in any other categories.
Secondly, the 2003 team wished to follow the club’s history of attending IGVC and creating robots for sale by external organizations. To achieve these split objectives, the 30-person team split into 6 subteams: Admin, Mechanical, Electrical, Software, Outreach, and Features & Applications. The Features & Application subteam’s push for a marketable and oilfield-focused robot was unable to be sustained when ARVP was still trying to create a new robot for IGVC. Consequently, two robots, Kodi-Hack and Ursa Major, were developed without sufficient ability to compete in IGVC or the polish to be sold to industry.
After Ursa Major’s failure to reach maturation in 2004-2005, the team decided to reorganize. Citing a lack of team communication, the 20 members of ARVP moved to a 3 subteam system (Mechanical, Electrical, Software) and split administrative tasks equally to force discussion. The team also decided to focus solely on IGVC, rather than real-world application. However, the team was critically low on funds, forcing them to reuse Ursa Major parts and focus on software development. The new system and restrictions proved useful, as ARVP was able to achieve second in navigation at IGVC 2006 with Ursa Minor.
In 2007, ARVP focused on increasing the team’s funds and member size to stay afloat. As part of a bid to increase awareness, Ursa Major was outfitted with the body of a stuffed bear and ran for SU President. Running on a platform of perfect efficiency and the death of all humans, Ursa Major came third in the election and an ARVP member won! More importantly, the publicity stunt worked and ARVP received the funds and membership needed to stay afloat. The team culture crystallized around this moment, and many of the campaign banners and promotional materials are still in the ARVP workspace today.
Robots from this era

Kodiak

Kodi-hack

Ursa Major

Ursa Minor
2008-2016 • Making a Splash









Thanks to the successful recruitment pitch in 2007, ARVP remained alive. However, the team fundamentally changed - the entire team turned over to seven new master’s students. Seeking to relate ARVP closer to their research and interests, ARVP transitioned to RoboSub and began an entirely new field of development.
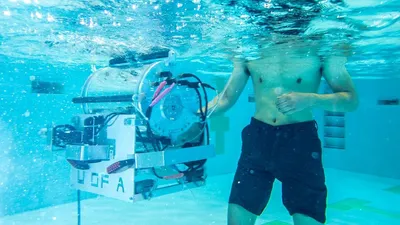
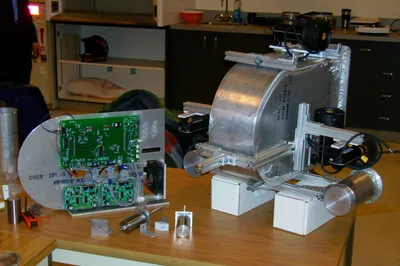
Though nearly no documentation was created in the 2008-2013 period, it’s clear that the team invested heavily into electrical systems. Since the team had no mechanical members, ARVP’s first Autonomous Underwater Vehicle (AUV), Beracuda was constructed with stock pipes and a welded hull. In RoboSub 2008, Beracuda achieved 11th place despite multiple system failures. Each failed system was sequentially redesigned, replaced, and verified over two years, but Beracuda’s welded hull became too constraining. To fix this issue, ARVP developed SubmURSA. While it was a square pressure vessel, the new boxy design allowed for simple electrical trays and the addition of new electrical systems like cameras! In RoboSub 2011, SubmURSA earned a respectable 8th place.
At this point, ARVP’s main electrical systems were stable, but the team couldn’t complete most autonomous challenges. So, the team opened back up to undergraduate students in 2012. With 12 members, the team could now rededicate itself to mechanical and software subteams. In 2013, ARVP debuted AquaUrsa. The AUV featured custom machined parts, carbon fiber tube mounting, and a new software framework called “DisCo”. Over the next three years, AquaUrsa’s design was slowly streamlined while sonar and torpedo systems were added. These additions allowed ARVP to earn 8th place overall in multiple years! ARVP’s demographic was shifting simultaneously with AquaUrsa. By 2016, the team was now predominately software driven, electrical systems had been solidified, and the core team from 2008 was about to graduate.
Robots from this era

Bearacuda

SubmURSA

AquaURSA
2017-2024 • ARVP Strikes Back









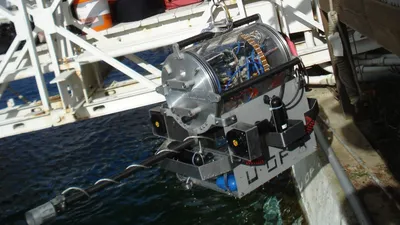
With the maturation of AquaUrsa’s technology, testing became ARVP’s focus. This lead to significant frustration with the robot. Its weight, one accessibility port, and lack of space for subsystems made pool tests difficult and eventually blocked all new potential developments. So, the younger generation of ARVP members sought to create a new robot that doubled the capabilities of AquaUrsa. They created Auri, which was built to two cylindrical hulls to double the internal space of AquaUrsa and create more access points for subsystems. The hull was then surrounded by a frame of flat external platforms for subsystems. At this point, the hull and frame closely resembled a tie-fight from Stars Wars, so the team leaned into the aesthetic!
However, Auri’s design was becoming unachievably expensive - just the hull, frame, and internals cost ARVP’s entire annual budget. During Auri’s debut in RoboSub 2017, the entire robot flooded. While there was no permanent damaged, the required spares proved too expensive and the team couldn’t afford subsystems to improve the robot. To resolve the issue, ARVP brought back the Admin team from the early 2000’s. Initially, this subteam focused almost entirely on gaining funds to further Auri’s design. Through the now defunct USEED platform, the team was able to consistently fundraise over $10k annually for purchases like the Doppler Velocity Log, servos for subsystems, and thrusters. These additions, along with significant improvements to Auri’s vision system, allowed the team to win 4th place in RoboSub 2019.
COVID then stopped ARVP in its tracks. The team was unable to access Auri or its workspace for a full year. So, members focused on the conceptual design for its next robot, Arctos. Its initial design was based off x-wings, but it was simplified multiple times to create a manufacturable shape. With little testing, communication, or hands on experience, Arctos’ hull and frame were created in this time. Sadly, ARVP had no opportunities to gain new members throughout 2020 and 2021 - the team size dwindled to 8 at its lowest and had almost completely turned over to brand new members in early 2022. The ARVP members of 2022 decided to revert back to Auri so they could be ready for RoboSub 2022. The entire year was simply spent relearning the software stack, understanding what competition logistics/deliverables were required, and rebuilding the torpedoes. Luckily, the team was able to find its footing in the early days of RoboSub 2022 and achieved 4th place.
After the competition, the team decided it had to essentially reboot ARVP. Going into school year, the team would move to Arctos, entirely redevelop the software stack, create a new website, build out every subteam, purchase new equipment, and aim to win RoboSub 2023. Fall 2022 was spent gaining both funds and members - over $100k was raised and 60 new students joined the team! Consequently, most of the semester was spent onboarding and developing design systems. At the same time, the executives had to fix Arctos. The hull from 2020 failed to pressurized and needed major reworking. Additionally, previous designs had not accounted for wire harness space in the hull which, leaving no space for internal batteries. Sorting these two issues, along with creating a basic software stack, took months of effort.
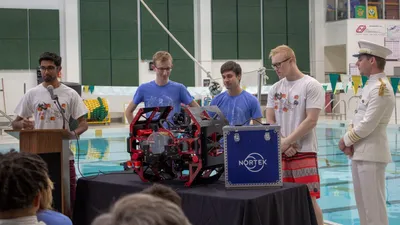
Arctos was finally ready for team use in Winter 2023. To create pressure to succeed, ARVP planned a sponsorship event in April where donors, past members, and potential sponsors would gather to see the new robot unveiled. The newly expanded team worked tirelessly for four months to improve the software stack, fix mechanical issues, and refine electrical designs. Just in time for the event, Arctos was able to autonomously complete RoboSub 2023’s qualification task. Thus, the last four months were spent testing Arctos’s vision system, completing competition challenges, and completing competition deliverables. Four whole months of testing and deliverables proved incredibly fruitful. At RoboSub 2023, ARVP was able to take 26 members to competition, won third place, was the best performing team from North America, won best video, won best design presentation, and received special awards for data sharing.
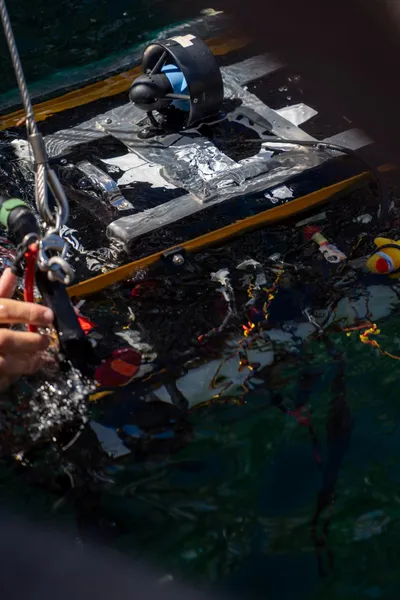
Due to the flooding of Arctos’ hull, we were not able to complete our finals run during RoboSub 2024. Despite flooding, we didn’t give up and the team pulled together and worked for 5 hours straight trying to get Arctos operational. We ranked 7th overall and received the best design documentation award, along with best video and best design strategy presentation.
Robots from this era
Auri

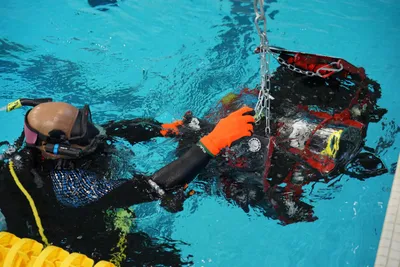
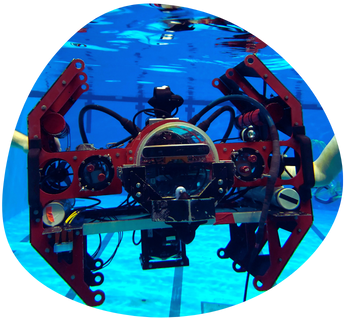
Arctos
2025-Present • Aquatic Duos





Left with an unreliable robot and a large executive turnover, due to members graduating, ARVP was left to figure out a plan of action and reconnect ourselves with the club’s triple mandate — building community, developing skills, and connecting members to career opportunities. As a result, the team set an ambitious set of goals for the year: fix Arctos, develop a second companion robot, start the design process for the new robot, and upgrade our robot’s subsystems.
After 4 months of hard work, the team was able to get Arctos fit for testing. By April 2025, we had two robots in the water, Arctos and our mini-bot Koda, however we realized that Arctos would become a money sink if we took them to competition. In response, we decided to pivot our focus on accelerating Kenai’s development to finish in time for competition. ARVP left RoboSub 2024 with no robot and a lot of uncertainty, to finishing RoboSub 2025 with two newly developed robots, a 9th place finish overall, 5th place in design documentation, and a renewed sense of community and drive for innovation.
Robots from this era
Koda

Kenai