Website under construction! Stay tuned!
This page is still under development. ARVP's website development team is working hard to provide the information you're looking for. We pride ourselves on making a beautiful and functional website and appreciate your patience.
In the meantime, check us out on Instagram! @uofa.arvp
Now retired, Arctos is ARVP’s most recent AUV to compete in RoboSub. The initial design work was completed during COVID, and significant changes were made during the manufacturing phase in preparation for Arctos’ debut in 2023. The exploded view below provides a brief overview of Arctos circa RoboSub 2024. Mechanical, electrical, and software CI/CD efforts for individual systems are highlighted underneath the exploded view.
Key Software Stack Components
Mission Planner
Controls Arctos’ decision-making via a custom behaviour tree. By looking at sensor data from our cameras, DVL, and IMU, the mission planner runs every feasible calculation required for decision making. The mission planner will simply listen for the required information and launch the necessary missions as determined by the tree.
Motion Planner
The motion planner handles long time horizon movements, based on waypoints provided by the mission planner. A custom motion planner was developed that receives a sequence of waypoints (relative or absolute), allowing the robot to move around the world while looking elsewhere.
Sensor Fusion
The Doppler Velocity Log and Inertial Measurement Unit, which are both in the Nortek Nucleus 1000, allow Arctos to determine its present state. This data is combined together using an extended Kalman filter to allow for temporary dropout in either data source, resulting in a robust estimation of the robot's state through time.
Vision Pipeline
Data is labeled by hand using CVAT, transformed, and then fed into Ultralytics' YOLOv8 framework for model training. The resulting .pt model is converted into TensorRT format to enhance inference speed and efficiency. In the final stage, multiple instances of a ROS2-based vision node are deployed, each running a different task-specific model.
Mapper
The mapper takes data directly from our vision pipeline and uses the scale of bounding boxes to estimate relative poses of objects of interest. Using our robot's estimated pose in a static world frame allows us estimate a position and orientation in the world.
Aluminum Hull
Has two entry points. The top lid allows quick access to the printed circuit board for repairs and modifications. The acrylic front lid allows for vision and modifications to the battery management board. Both entry points utilize double O-ring seals and the hull contains leak sensors for additional risk management. Hull seams have been improved for a 20m depth rating.
Electronic Trays
The electrical trays host Arctos’ internal camera, printed circuit board, and wire harness. The board has been optimized to reduce weight, provide space for labeling, and allow clean routing. Ample space has been left on the bottom electrical tray for future continuous improvement.
Torpedoes
The spring-propelled torpedo system is actuated by a single high-torque waterproof servo using a custom servo horn. A metal rod opens a series of links connected to two metal levers that releases a spring plate and shoots the torpedoes. Fires two torpedoes accurately to distances up to 3 meters. Torpedoes are balanced internally with foam and weights to improve flight stability, but primarily 3D printed.
Dropper & Markers
Release two dropper markers that sink straight down accurately for 10m, as the markers’ helical fins induce the gyroscopic effect. The nose of the marker is machined out of aluminum in-house on a CNC mill.
Claw
Utilizes a parallel plate claw mechanism with a soft gripper design for ease of software integration and robust manipulation of complicated geometries. The grippers were made compliant using a combination of 3D printed flexible TPU and rigid resin; the tapered wedge shape causes the gripper to curve around the object as it’s closing
Battery Hulls
Four custom lithium ion batteries are located in two external cylindrical battery hulls connected by SubConns. This solution eliminates thermal and water damage risks related to battery swaps. It also allows hot-swapping, ensuring a continuous power supply with one battery always active.
Doppler Velocity Log
Arctos’ Nortek Nucleus 1000 Dopper Velocity Log provides positional, velocity, and angular information - meaning only one sensor is used to guide motion. The Doppler Velocity Log has been positioned to minimize both vibrations and electromagnetic interference.
Bottom Camera & Hydrophones
Bottom facing obstacles are identified through two methods. Three hydrophones allow Arctos to detect the angle and distance to pingers. Two external cameras rated to 10m allow vision models to detect tasks and confirm objects have been picked up by the claw.
Frame
Arctos utilizes a frame made from anodized aluminum stock L-Brackets. The setup reduces weight and allows for excess mounting space and modularity.
Key Printed
Circuit Boards
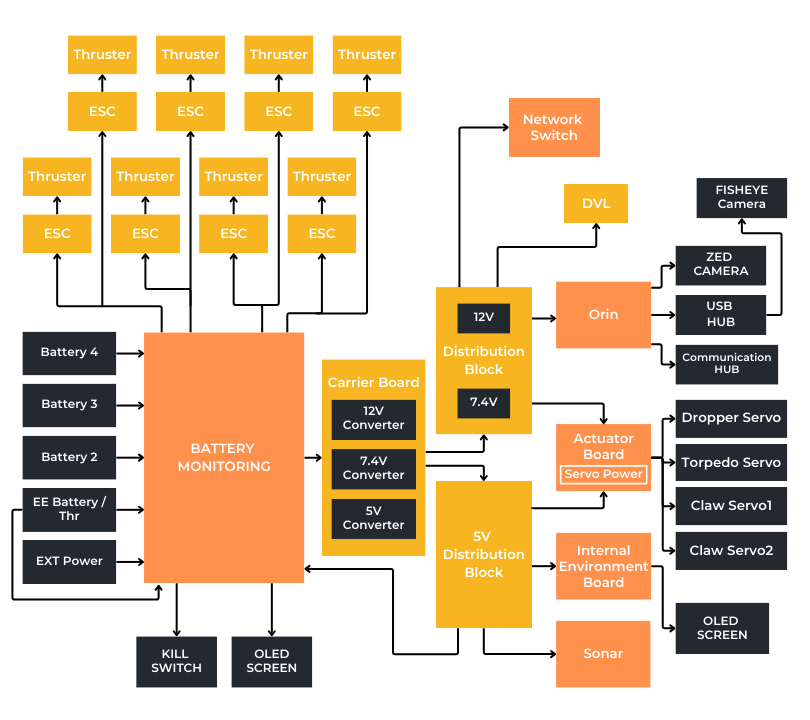
The 4 batteries, 8 ESCs, and 8 thrusters feed into the Battery Monitoring Board where it monitors the voltage and current for Arctos. Includes reverse polarization protection and connection to a kill switch.
Mother-Daughter setup to split power into 5V, 7.4V, and 12V. Connects to respective distribution blocks that power the PCBs, servos, and OBC.
Provides internal environmental information such as temperature, pressure, humidity, and battery voltage. Displayed on two OLED screens. Also connects to four leak sensors on the bottom of the hull.
Provides information to Dropper, Torpedo, Claw1, and Claw2 servos. Communicates with these to drop, fire, or grab. Includes current sensing to ensure servos are not over torqued.
Has three separate signal paths for three hydrophones. Signals are preprocessed and then passed to a microcontroller for analog to digital conversion. Angle and distance to pinger are determined via software.
Software
Dependencies
Additional
Specs
Cooling
The main heat generators, NVIDIA Jetson Orin and Li-Polymer batteries are positioned directly against the walls of Arctos. This allows the thermal properties of the aluminum hull to water-cool these components. When in water, the onboard computer only reaches a maximum temperature of 40 degrees Celsius.

Arctos’ electrical system provides power and communication between the onboard computer and all subsystems. Power from the batteries are handled safely by a battery monitoring board and then passed to thruster ESCs and voltage converter boards. From the converter board, all other systems are powered like the actuator board, the internal environment board, and the jetson orin via terminal blocks.
This year, Arctos underwent significant changes. ARVP has moved to using four lithium ion batteries in external pods. Thus, the associated wire harness has been replaced with a subconn and low gauge wires. Concurrently, the electrical trays were redone as the old battery basket within the hull was removed to provide space for better cable management and connectors.
The updated wiring harnesses and labeling system have resolved unplugging and rewiring errors. Most servos have been replaced with 7.4V servos rated for 200m that allow for multiple rotations. The related wiring was redone and a converter board was integrated to the system. A new passive sonar system has also been added to Arctos this year. Leak sensors were also mounted to the bottom interior of the hull as part of our hull risk-reduction program. There are now two OLED screens to read battery voltages, temperature, and pressure, allowing the mechanical team to perform pre-pool test checks. Lastly, the OBC starter and external power now function through subconns to allow for in-water hot swapping.
Arctos’ power management system originates with our batteries, where all of Arctos’ power is initially drawn. Leading up to Robosub 2023, our system utilized 5 lithium polymer batteries with one solely dedicated to electronics, and the others dedicated to our 8 thrusters. The battery dedicated to the electronics was our primary limitation in pool-test length. Additionally, we utilized a carrier board with two 12V converters wired to a 5V and a 12V distribution block. This setup was ideal for distributing power at the time; however, as we switched components, our requirements shifted.
This year, we are switching from 5 lithium-polymer batteries to 4 lithium-ion batteries. The reduction in batteries was intended to maintain symmetry with the introduction of the two external battery hulls. We also added a new 7.4V converter to our carrier board, accommodating our new underwater servos. Moving forward, we intend to implement a leveling board to regularly switch the path of the power draw for the electronics between the four batteries to extend our pool tests.

Arctos’ Actuation board controls how we drop markers, deploy projectiles, and move objects during competition. This is made possible by four servo motors; two dedicated to the claw, one to the droppers, and one to the torpedoes. Last year, we relied on IP67 servo motors that we had to further waterproof ourselves by covering with epoxy. The risk of leaks was ever-present; jeopardizing Arctos’ success in competition. Additionally, we had no method of sensing the closure of our claw on objects, leading to current spikes that risked burning out the servo.
To address these issues, we switched out last year’s servo motors to 7.4V servos rated for 200m. ARVP also plans to implement haptic feedback to our claw sub-system. This adjustment would allow the aforementioned current spikes to be sensed, with the servo angle being adjusted in response to prevent burnout.
Finally, we are developing a portable test board to allow the mechanical team to easily conduct a pressure test without assembling all the electronics. This will save immense amounts of time when pressure testing and testing new mechanical subsystems requiring actuation.
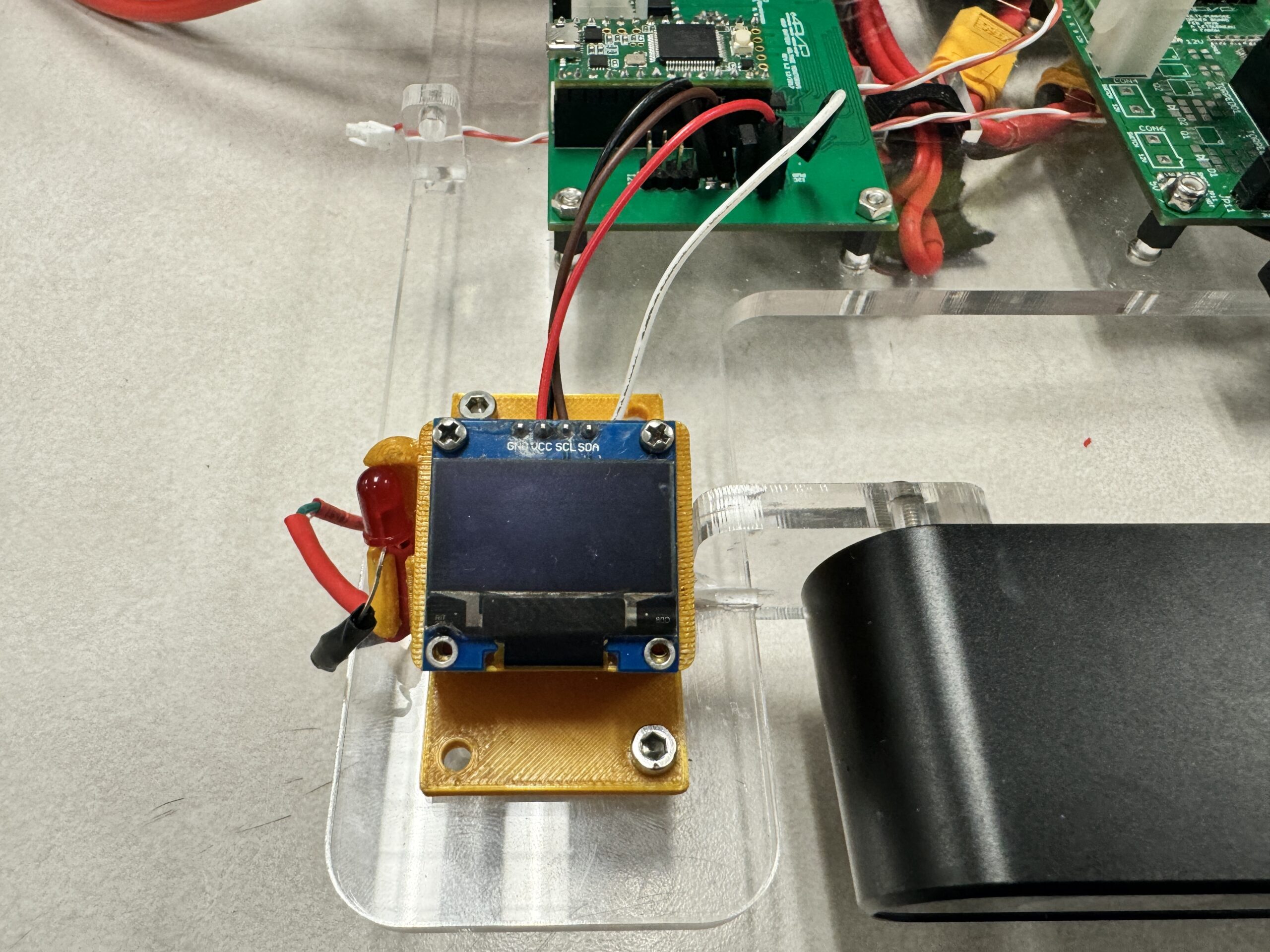
In past years, ARVP’s AUVs had no direct method to display information. Consequently, it was the software team's duty to monitor battery voltage, internal pressure, and other critical information. Eventually, this led to missed information that jeopardized key pool tests. To mitigate this, Arctos has OLED screens that act as a visual aid in the monitoring of the robot's internal environment to ensure everything is secure and functional before submerging the AUV. As of RoboSub 2023, we had one OLED screen that we utilized to monitor only temperature and pressure. This served us well in ensuring sufficient thermal management and monitoring pressure as our mechanical team conducted pressure tests before pool tests and competition. However, our display information did not allow us to ensure all systems were plugged in and receiving power. With this issue in mind, we developed a second OLED display to confirm that all electronics are connected correctly, including servos and individual batteries. This is a huge aid when wiring the robot before pool tests as the electrical assembly is quite complex.
For last year’s competition, we had no passive sonar system to accomplish the pinger task, costing us points. Although we previously had a sonar system, the decision was made to omit it to reduce complexity and focus on other key aspects of performance.
To compete at a higher level this year, we are implementing a passive sonar system, which would allow us to navigate the course in the right order, completing the pinger task. Two projects are being completed in tandem. Firstly, the previous sonar designs are being modified and updated. Secondly, in the case that the new system cannot be completed and tested in time, a backup purchased solution has been identified and is being procured.
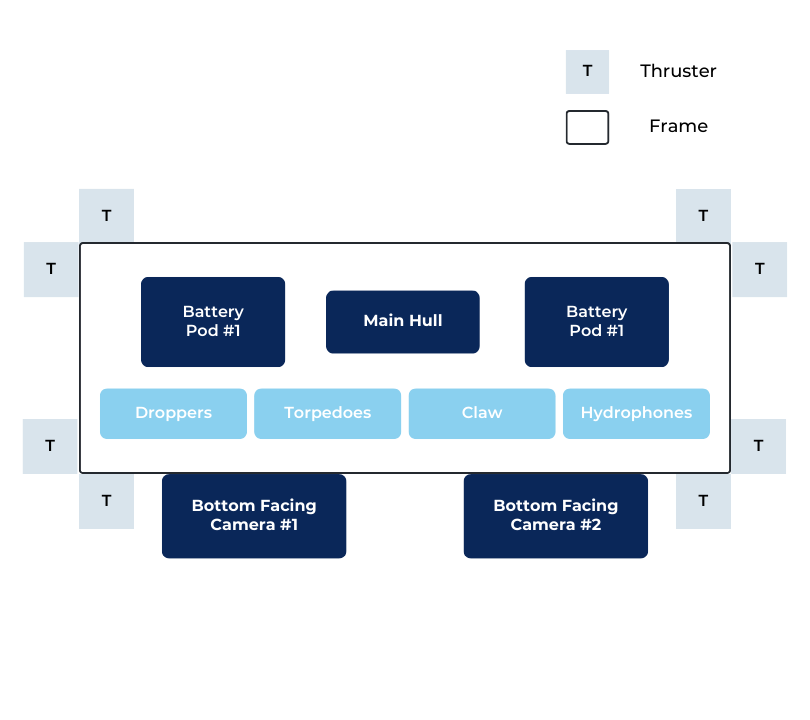
Arctos is composed of an aluminum hull with two entry points that contains all critical electronics for the robots function. The hull is surrounded by a frame to support subsystems like Arctos’ torpedo launcher, claw, droppers, sonar, doppler velocity log, external cameras, and buoyancy pods. The original design was meant to emulate an x-wing, but the form factor has been simplified.
Since RoboSub 2023, Arctos has essentially been rebuilt mechanically. Arctos’ hull (multiple aluminum panels bonded together) is a legacy project with several integrity faults. As such, the o-rings on both lids have been replaced. The hull was disassembled and remade with a marine steel epoxy of a higher strength to withstand the stress concentrations at the corners of the hull. During this process, through holes were added to accommodate new subsystems. The torpedoes system was completely redesigned to allow for reliable firing at a distance. The claw mechanism has been slightly upgraded to increase structural strength, and novel grippers have been added to deform around RoboSub 2024 obstacles. Hydrophone mounts have been developed to support passive sonar detection, and new external battery pods allow for hot-swapping plus improved safety. Subsystem arrangement on the frame has been modified to provide space for new systems. Finally, old buoyancy pods and weights have mounts that are visually appealing and allow configuration changes.

Arctos relies on a system of lithium-polymer batteries for all functions from powering the thrusters to monitoring the internal environment. As the main housing and protection of the batteries, the battery hull is indispensable for enabling prolonged operations while dealing with thermal, accessibility, and space restraints.
For RoboSub 2023, Arctos accommodated all five batteries in the lid of the robot’s main hull, where the other electrical components are housed. Thermally, this setup allowed for heat dissipation from the batteries to the aluminum hull, and then the surroundings. However, the tight space in the hull presented challenges in the form of puncture risks and accidental unplugging of electronic components when accessing the hull. Further, when switching batteries, both lids of the main hull would have to be removed while wet, leading to potential water damage to the electronics and requiring re-pressure testing of the hull.
To address these limitations, this year we’ve relocated the batteries to external cylindrical battery hulls connected by SubConns. This solution eliminates all aforementioned risks by providing adequate space for the batteries to prevent punctures and remove them from the other electronics’ proximity, mitigating thermal and water damage concerns. This new configuration additionally makes battery swaps seamless as two full sets of enclosures and batteries allow for hot-swapping, ensuring a continuous power supply with one battery always active.

To complete the RoboSub’s bin task by releasing markers onto designated targets, the droppers are an essential component of Arctos. In 2023, our droppers consisted of a 3D-printed body housing a servo motor with a C-shaped servo horn that released markers as it rotated. The droppers themselves were 3-D printed bodies with helical fins and a CNC-milled aluminum tip. The weight from the aluminum tip combined with the gyroscopic effect from the helical fins cause the markers to follow a straight path down.
Overall the subsystem was extremely reliable, giving us no issues during the competition. However, the system had room for further optimization to minimize volume, improve reloading and integrate new servos.
To decrease the volume of the dropper mechanism, the servo motion was decreased from 180 degrees to 30 allowing the chambers to be closer together. To improve reloading, knurling was added to the twist on caps to make them easier to grip when wet. Lastly, properly rated IP 68 servos were integrated to improve consistency across subsystems.

The mechanical claw allows us to perform manipulation tasks, with two grippers controlled by individual servos and pin joints driving bearing carts along an aluminum track. To assist with grasping a variety of geometries, the grippers were made compliant using a combination of flexible TPU and rigid 3D printed materials; the tapered wedge shape causes the gripper to curve around the object as it’s closing. Although we did not perform manipulation tasks at Robosub 2023, verification test were performed. They identified three key issues. Firstly, rigid 3D printed parts break frequently during transport. Secondly, the ribs easily pop out of the flexible structure as the pincers bend. Finally, the width of the pincers requires unreasonable precision. All of these issues were resolved by simply making the pincers larger and the rigid pieces thicker. Additionally we switched the rigid material from PLA to durable resin to improve the ductility. The increased size of the pincers permits the use of M2 screws to keep the ribs attached. To prevent damage during transit, clips will be added to keep the pincers in a safe position.

Historically, ARVP has differentiated itself from its competitors by completing RoboSub’s torpedo related tasks using simple and functional designs. To this point, ARVP’s 2023 torpedo system consisted of a sliding mechanism directly linked to the servo motor, facilitating the release of the spring-loaded plate. This design aimed to ensure a streamlined and direct connection between the servo and the launching mechanism.
However, this design resulted in excess friction in the system, requiring team members to disassemble and regrease the system every dozen launches. Additionally, due to the sliding mechanism’s direct connection to the servo motor, the reload process was software-dependent, which proved cumbersome during competition.
For RoboSub 2024, the torpedo system was fully redeveloped to fix underlying issues. Now, a new powerful IP68 rated servo rotates with a custom servo horn. This moves a metal rod, which opens up a series of links connected to two metal levers. When the levers open, a spring plate is released, which shoots forward with the torpedoes. This new system eliminates problematic friction by utilizing torque from the levers. These changes, coupled with a revamped reloading system allowing for manual reloads, provide a drastic improvement in overall functionality.
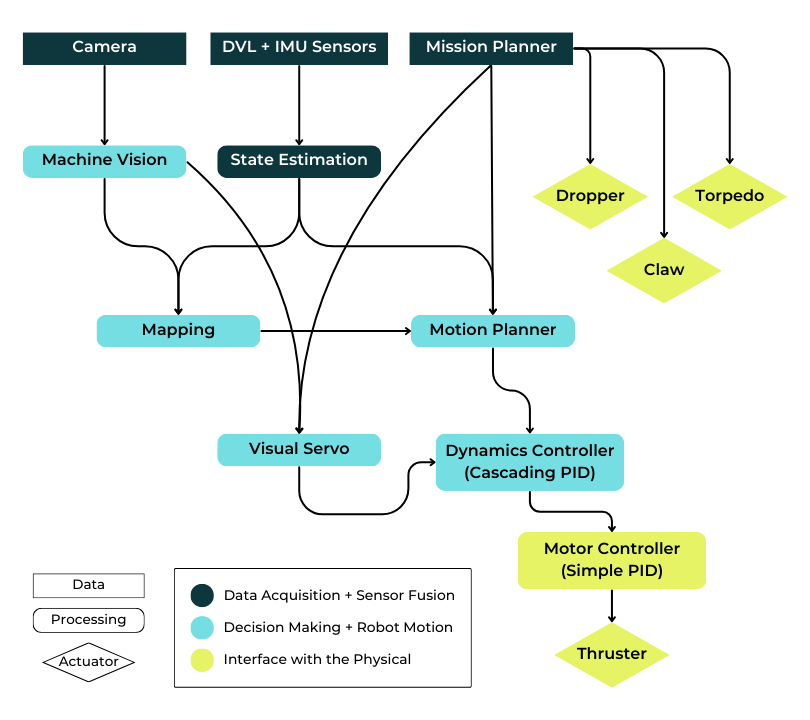
For RoboSub 2023, ARVP’s software stack was completely rewritten from scratch. A key change was to switch to ROS2 and modularize each node to allow for replaceable nodes and independent development. This system crystallized into individual machine vision, state estimation, mapping, motion, mission, control, and actuation nodes. Systems are tested both in-simulator and at bi-weekly pool tests.
With a stable platform, only key nodes were re-developed or improved for RoboSub 2024. Our mission planner has been split into two nodes. One node runs every feasible calculation related to behavior tree decision points. Another only is the behavior tree itself with reduced steps required to write missions. This should ensure that the two nodes are easily updatable and our mission planning system is evergreen. Our custom motion planner now accounts for vertical movement in pathing and obstacle avoidance. The vision node was updated to accommodate the newest versions of TensorRT, YoloV8, and Arctos’ three camera system. Likewise, the models used by the vision node are also now more robust, as new segmentation based models are trained with additional negative and generated data. The team has made significant modifications to sensor fusion on the DVL itself, which has reduced yaw drift. A new sonar node has also been integrated to provide pinger angle and distance information to the mapper and mission planner nodes. Finally, major additions have been made to the state estimation node to determine Arctos’ location without DVL input, allowing Arctos to pick up objects even when proximity to the DHD table impedes sensors.
The motion planner handles long time horizon movements, based on waypoints provided by the mission planner. At RoboSub 2023, Arctos’ motion planner utilized Nav2, which is designed for wheeled robots. Consequently, yaw was coupled to the direction of travel. As part of ARVP’s RoboSub 2024 competition strategy, Arctos should visually identify and update mapper positions of tasks while moving to the location of the pinger. This is impossible with Nav2.
However, replacing Nav2 results in the loss of obstacle avoidance. Ultimately, ARVP decided the trade-off was acceptable for the following reasons:
The low density of obstacles can be handled by the mapper and mission planner
6DOF pathing simplifies the torpedoes & octagon tasks, and recovery behaviors
Actions such as barrel rolls can be executed without developing an additional system
A custom motion planner was developed that receives a sequence of waypoints that constitutes a specific mission. Design emphasized backwards compatibility with a mode that allows for simpler motions to function with missions written prior to 2024. Additionally, the motion planner can take either absolute or relative positions for waypoints and orientation targets, allowing the robot to move around the world while looking elsewhere. The motion planner is integrated into the software stack as a ROS2 action server, which allows it to run asynchronously to the mission planner. Figure 3 below shows a sample motion plan for barrel rolls.
The mission planner node controls Arctos’ decision-making via a custom behavior tree. By looking at sensor data from our cameras, DVL, and IMU, the mission planner is able to follow the predetermined logic in the tree. Each task in the tree represents its own complicated set of instructions, entailing their own behaviors and missions.
For RoboSub 2023, ARVP developed the initial version of the mission planner. Since the entire repo was developed from scratch concurrently, only a minimal viable product existed. Consequently, the system required significant knowledge to write new missions and was poorly optimized to run multiple calculations at once.
This year, mission planner developments center around improving ease of use and maintainability. Every feasible calculation in the behavior tree will be run concurrently by another node. Consequently, the mission planner will simply listen for the required information and launch the necessary missions. This, in addition to visualization tools and modified tree logic, should allow members to easily write and modify missions to stay adaptable.
ARVP is only able to pool test Arctos biweekly. Consequently, the software team needed to devise a method to run additional tests and confirm operation rather than wasting precious time. Our custom-built simulator was designed to quickly test and verify other subsystems in the software stack, and even test full-length missions in a virtual environment.
The simulator is built on top of Gazebo with custom plugins to simulate the hydrodynamics of the robot, control thrusters and actuators on the robot, and generate mock sensor data to interface with the rest of the software stack. Gazebo gives us the flexibility to quickly modify plugins, models, and worlds when needed, while also being tightly integrated with ROS2. For RoboSub 2023, the simulator was only able to emulate robot movement.
This year, the software team is focusing on adding claw related tasks to the software stack. Consequently, the simulator has been updated with the ability to render images from virtual cameras, create mock bounding boxes for objects, and simulate physical interactions such as the claw. As final subsystem designs and competition obstacles are confirmed, the simulator will be updated with accurate models.
While Arctos utilizes a DVL, IMU, and initial mapping estimates to dead reckon its position, this method is inaccurate. To deal with drift and contribute to robust and adaptable mapping, Arctos’ vision node identifies and locates objects in its environment. Currently, we deploy models using TensorRT and YOLOv8 with GPU acceleration to process 2 camera feeds at 60 frames per second. Once an object has been identified, its estimated position is updated.
For RoboSub 2023, models only existed for gate, torpedo, buoy, and octagon surfacing tasks. While these models were effective for competition, we noticed that the bounding boxes were inaccurate whenever approaching objects that were angled.
To improve performance and remedy issues, this year the vision system has been upgraded to generate oriented bounding boxes to make it easier to autonomously pick up objects. Moving forward we are working on creating a 6D pose detection algorithm to allow us to more accurately map Arctos’ environment.